The Invisible Hands on Your Steering Wheel
Table of Contents
How Lane Keep Assist Works — And Why It Matters
Have you ever been on a long highway drive, late at night, and felt your car drifting slightly toward the edge of the lane? Maybe you were tired. Maybe you glanced at your phone for a second. Now imagine if your car could gently nudge itself back into the lane — without you doing anything.
That’s exactly what Lane Keep Assist (LKA) does. It’s one of the most important ADAS (Advanced Driver Assistance Systems) features in modern cars, and understanding how lane keep assist works can change the way you think about driving safety.
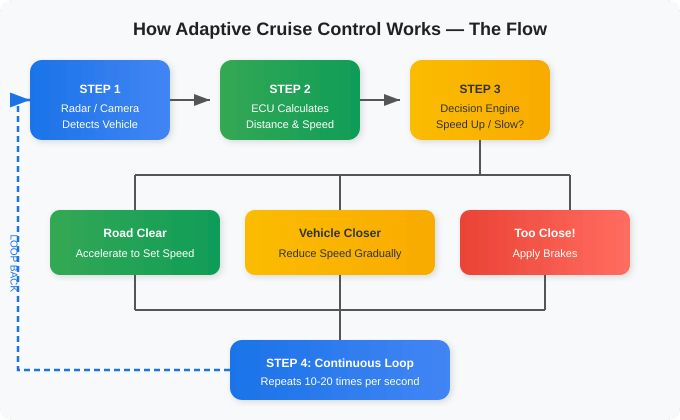
In my previous blog on How Adaptive Cruise Control Works, we explored how your car manages speed automatically. Lane Keep Assist is the other half of the equation — it manages steering. When you combine ACC with LKA, you get Level 2 autonomy — the car handles both speed and direction.
This post breaks down how lane keep assist works from the camera behind your windshield to the electric motor in your steering column. And yes, there’s a Geek Zone for those who want the computer vision details.
What Is Lane Keep Assist?
Lane Keep Assist is a driver assistance feature that uses a forward-facing camera to detect lane markings on the road. When the system sees that your car is drifting towards a lane boundary without the turn signal being activated, it intervenes — either by warning you or by applying a gentle steering correction to guide you back.
Think of it as an invisible co-pilot with their hand lightly on the wheel, ready to nudge you back if you start drifting.
But here’s an important distinction that most people miss — there are actually three different levels of lane assistance, and they’re not the same thing.
Lane Departure Warning vs Lane Keep Assist vs Lane Centering
1. Lane Departure Warning (LDW) — The Alert System
This is the most basic version. LDW simply warns you when you’re about to leave your lane. The warning can be a beep, a steering wheel vibration, or a visual alert on the dashboard. But it doesn’t steer. It’s entirely up to you to correct.
2. Lane Keep Assist (LKA) — The Gentle Nudge
LKA takes it a step further. When it detects you’re drifting, it applies a gentle steering torque through the Electric Power Steering (EPS) system to guide you back into the lane. It’s not aggressive — it’s more like a soft suggestion from the car. You can always override it by steering normally.
3. Lane Centering Assist (LCA) — The Full Experience
This is the most advanced version. Instead of just reacting when you drift, LCA actively keeps you centered in the lane at all times. It provides continuous steering input, handles gentle curves, and works alongside Adaptive Cruise Control to deliver a semi-autonomous driving experience. This is what cars like the XUV700 and Hyundai Tucson offer in their top trims.
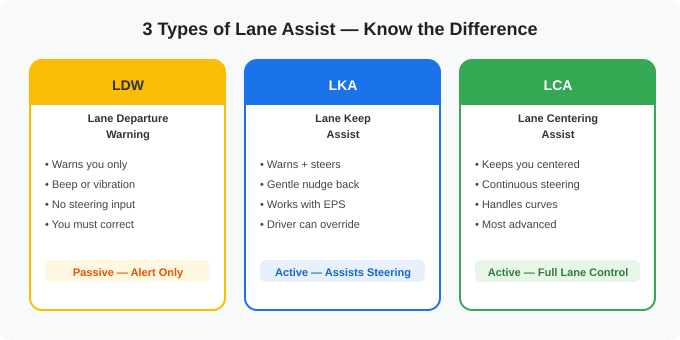
Figure 1: The Three Levels of Lane Assistance — LDW vs LKA vs LCA
How Lane Keep Assist Works — Step by Step
The magic of lane keep assist comes down to four components working together in a continuous loop: a camera, an image processor, a decision engine, and the electric power steering motor.
Step 1: The Camera Scans Lane Markings
A forward-facing camera, usually mounted behind the windshield near the rearview mirror, continuously captures video of the road ahead. The camera is looking for one thing — lane markings. White lines, yellow lines, solid or dashed — the camera scans both sides of your lane to understand where the boundaries are.
Step 2: Image Processing Detects the Lane
The raw camera feed is processed by an onboard computer using image processing algorithms. The system converts the image to grayscale, detects edges (sharp brightness changes), focuses on the road region, and identifies straight or curved lines that represent lane markings. This happens in real-time, processing 30 or more frames every second.
Step 3: The ECU Calculates Your Position
The Electronic Control Unit (ECU) now knows where the lane boundaries are and where your car is positioned relative to them. It calculates the offset — how far your car is from the center of the lane. If the offset is within acceptable limits, no action is taken. If the offset exceeds a threshold (meaning you’re drifting), the system decides to intervene.
Step 4: EPS Applies Corrective Steering
If you’re drifting without your turn signal on, the system sends a command to the Electric Power Steering (EPS) motor. The EPS adds a small steering torque — a gentle nudge — that turns the wheels slightly to bring you back toward the center. This is called a torque overlay because it overlays a correction on top of whatever steering input you’re already providing.
If you resist the nudge (by actively steering in the opposite direction), the system understands you’re intentionally changing lanes and backs off.
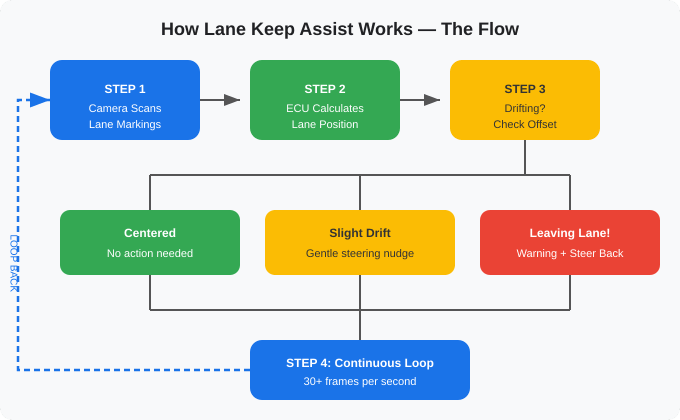
Figure 2: The Lane Keep Assist Decision Loop — Scan, Calculate, Decide, Correct, Repeat
How the Camera Detects Lane Lines
The camera behind your windshield doesn’t “see” lane lines the way you do. It sees pixels — millions of brightness values arranged in a grid. The system needs to convert those pixels into useful information: where are the lane boundaries?
Here’s the simplified pipeline:
1. Grayscale Conversion: The color image is converted to grayscale because lane detection relies on brightness contrast, not color.
2. Edge Detection: An algorithm (typically Canny edge detection) identifies pixels where brightness changes sharply — these are the “edges” in the image. Lane markings, being bright white or yellow against dark road, create strong edges.
3. Region of Interest: The system ignores the sky, trees, and buildings by focusing only on the lower portion of the image where the road is. This reduces processing load and false detections.
4. Line Detection: A mathematical technique called the Hough Transform converts the detected edges into lines. It identifies which edges form straight or curved lines — those are your lane markings.
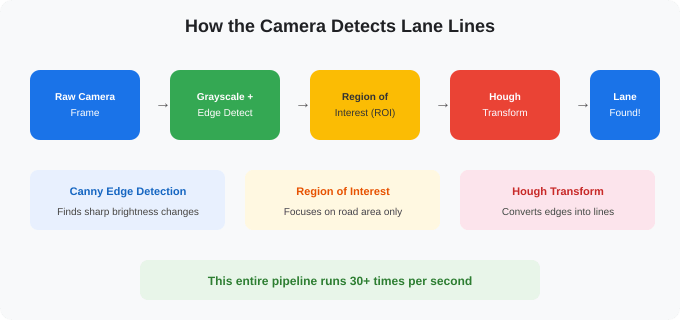
Figure 3: The Lane Detection Pipeline — From Raw Camera Frame to Lane Lines
This entire pipeline runs 30 or more times per second, giving the system a continuously updated picture of where the lanes are and where your car is positioned within them.
How Lane Keep Assist Steers Your Car — The EPS Torque Overlay
Once the system decides you’re drifting, it needs to physically steer the car. This is where the Electric Power Steering (EPS) system becomes crucial.
Modern cars use EPS instead of traditional hydraulic power steering. EPS has an electric motor attached to the steering column or rack. Normally, this motor assists your steering — it’s why turning the wheel feels light and easy.
Lane Keep Assist cleverly uses this same motor. When the system detects a drift, the ECU sends a torque overlay command to the EPS motor. The motor adds a small amount of steering torque — typically just 1 to 3 Newton-meters — in the direction needed to bring the car back. This is gentle enough that you barely feel it, but firm enough to correct the drift.
The beauty of the torque overlay approach is that it works alongside your steering, not against it. If you actively steer (indicating you want to change lanes), your input force easily overrides the system’s correction. The system never fights you.
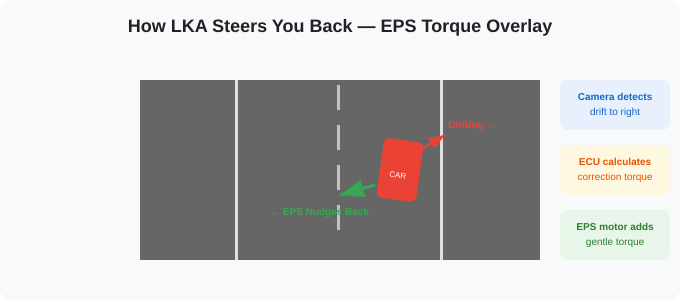
Figure 4: How EPS Applies Corrective Torque When You Drift
💡 Fun fact: In cars without electric power steering, some older LKA systems achieved the same effect by braking individual wheels using the ESP (Electronic Stability Program). Braking the right wheel slightly would pull the car to the right, and vice versa. Clever engineering!
Lane Keep Assist + Adaptive Cruise Control = Level 2 Autonomy
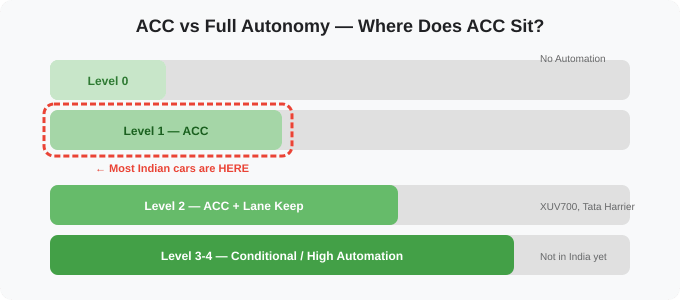
Here’s where lane keep assist becomes truly powerful. On its own, LKA is a Level 1 feature — it handles lateral control (steering) but not longitudinal control (speed). ACC, which we covered in the previous blog, is also Level 1 — it handles speed but not steering.
But when you combine LKA and ACC together, the car manages both speed and steering simultaneously. That’s Level 2 autonomy under the SAE classification. Your car is now handling the two most fundamental driving tasks — going straight and going the right speed — while you supervise.
This is exactly what cars like the Mahindra XUV700, Tata Harrier, MG Astor, and Hyundai Tucson offer in India. You engage ACC, the lane centering kicks in, and the car essentially drives itself on a well-marked highway. Your job is to supervise, keep your hands lightly on the wheel, and take over when needed.
⚠️ Level 2 is NOT self-driving. You must remain alert at all times. The system can handle routine driving, but unexpected situations — construction zones, unmarked roads, sudden obstacles — still need a human driver.
Does Lane Keep Assist Work on Indian Roads?
This is the question that matters most if you’re reading this from India. Let me be straightforward — lane keep assist has a tougher time on Indian roads compared to ACC.
Where Lane Keep Assist Works Well in India
National Expressways: The Mumbai-Pune Expressway, Yamuna Expressway, Bangalore-Mysore Expressway — these have well-painted, clearly visible lane markings. LKA works beautifully here. On a long expressway drive, it genuinely reduces fatigue by keeping you centered without constant micro-corrections.
New National Highways: Many newly built NH sections have good lane markings that LKA systems can detect. If the paint is fresh and visible, the camera picks it up well.
Where Lane Keep Assist Struggles in India
Faded or missing lane markings: This is the biggest challenge. LKA fundamentally depends on visible lane lines. Many Indian roads — even some national highways — have faded, worn, or completely missing markings. No lines means the camera sees nothing, and LKA simply switches off.
Construction zones: Temporary lane changes, missing markings, and confusing barriers can confuse the system. It may provide incorrect steering inputs or disengage entirely.
Poorly lit roads at night: Cameras need light to see. On unlit rural highways, the camera may struggle to detect lane markings even if they exist.
Rain and fog: Heavy monsoon rain reduces camera visibility significantly. Water on the road can also create reflections that confuse lane detection algorithms.
Multi-lane chaos: In India, lanes are often treated as suggestions. When vehicles around you are straddling lanes or driving between markings, LKA can get confused about which lane you’re actually in.
🇮🇳 India-specific tuning: Some manufacturers like Renault (with the 2026 Duster) and Mahindra are now tuning their ADAS systems specifically for Indian road conditions. This includes training algorithms on Indian traffic data and adjusting sensitivity thresholds for poorly marked roads.
Indian Cars with Lane Keep Assist in 2026
Lane Keep Assist is now available across a growing range of cars in India, not just luxury models:
Mahindra XUV700 — Level 2 ADAS with Lane Keep Assist, Lane Departure Warning, and Traffic Sign Recognition.
Tata Harrier & Safari — ADAS suite in higher trims includes LKA and LDW.
Hyundai Creta & Tucson — SmartSense package with Lane Keeping Assist and Lane Following Assist.
MG Astor — Level 2 ADAS with Lane Keep Assist and Lane Departure Warning.
Honda City & Elevate — Honda SENSING suite includes Lane Keeping Assist System (LKAS).
Kia Seltos & Sonet — ADAS package with LKA in higher variants.
Renault Duster 2026 — 17 India-specific ADAS features including LKA, tuned for local conditions.
GEEK ZONE — For the Technically Curious
If you want the technical details behind lane keep assist, this section is for you. We’ll cover the computer vision pipeline, the math behind lane detection, and how the steering correction is controlled.
The Computer Vision Pipeline — In Detail
Lane detection uses classical computer vision techniques. Here’s what happens inside the onboard processor:
Canny Edge Detection: Named after John Canny (1986), this algorithm identifies edges by finding areas where pixel intensity changes rapidly. It uses gradient calculation (Sobel filters) followed by non-maximum suppression and hysteresis thresholding to produce clean edge maps. The thresholds are typically tuned for road conditions — high-contrast white markings on dark asphalt produce strong edges.
Region of Interest (ROI): The algorithm masks out everything except the trapezoidal region where the road is expected to appear. This typically covers the lower 40–60% of the image, narrowing toward the vanishing point. This dramatically reduces false positives from detecting edges in trees, buildings, or the sky.
Hough Transform: This is the mathematical backbone of lane detection. The Hough Transform converts edge points from Cartesian space (x, y) into parameter space (ρ, θ), where ρ is the perpendicular distance from the origin to the line, and θ is the angle. Points that lie on the same line in image space accumulate in the same location in Hough space. By finding peaks in the Hough accumulator, the system identifies the dominant lines — which are the lane markings.
Modern systems have moved beyond basic Hough Transform to use Probabilistic Hough Transformwhich is faster and handles dashed lines better. Some premium systems now use deep learning-based lane detection (convolutional neural networks) that can detect lane boundaries even without painted markings, using road edges, curbs, and texture differences.
Processing Speed and Accuracy
A typical lane detection system processes each frame in about 25–35 milliseconds (28ms average in research benchmarks), achieving approximately 30–40 FPS. Accuracy on well-marked highways reaches 96%+ for straight lane detection using Hough Transform-based methods. Curved lane detection accuracy is lower, around 85–90%, which is why some systems use polynomial fitting (fitting a second or third-degree polynomial curve) instead of straight lines for curved roads.
EPS Torque Control — The Numbers
The corrective torque applied by LKA through the EPS motor is carefully limited. Typical values:
Maximum corrective torque: 2–5 Nm (Newton-meters) — enough to guide but not overpower the driver.
Response time: 50–200 milliseconds from drift detection to steering correction.
Minimum operating speed: 60–65 km/h for most systems (some work from 40 km/h). Below this, the system disengages because lane changes are frequent in city driving.
Driver override: The driver can override with approximately 2–3 Nm of counter-torque — basically just normal steering force. The system detects this through the EPS torque sensor and immediately backs off.
The control algorithm uses a PID controller (similar to what ACC uses) to smoothly apply and release the corrective torque. The Proportional component responds to the current offset, the Integral component prevents steady-state drift, and the Derivative component ensures smooth transitions without jerky corrections. Some newer systems use neural network-tuned PID gains that adapt to driving conditions and road curvature.
Camera Specifications
The forward-facing camera used for lane detection typically operates with these specs:
Resolution: 1280×960 or higher (some use 1920×1080 for better accuracy).
Frame rate: 30 FPS minimum, some systems run at 60 FPS.
Field of view: Approximately 50–55 degrees horizontal, focused on the road ahead.
Detection range: 40–80 meters ahead, depending on camera quality and mounting position.
Mounting: Behind the windshield, near the rearview mirror, angled slightly downward.
Some advanced systems use stereo cameras (two cameras side by side) to gain depth perception. Subaru’s EyeSight is a well-known example. Stereo vision allows the system to estimate not just the position of lane lines but also their distance from the vehicle, improving accuracy on curves and at higher speeds.
Why Lane Keep Assist Needs Good Lane Markings
The fundamental limitation of vision-based LKA is that it relies on painted lane markings being visible to the camera. The contrast ratio between the marking and the road surface needs to be sufficiently high for the edge detection algorithm to identify it reliably. When markings are faded (low contrast), partially obscured (rain, dirt), or absent altogether, the system has no reference point — and it simply disengages.
This is a known weakness globally, but it’s especially challenging in India where road marking maintenance varies dramatically between expressways and regular highways. This is why the industry is moving toward HD map-based lane positioning and deep learning-based road edge detection — technologies that can estimate lane position even without painted markings, using road edges, barriers, and contextual cues.
Key Takeaways
Lane Keep Assist uses a forward-facing camera and image processing algorithms (Canny edge detection + Hough Transform) to detect lane markings in real time, processing 30+ frames per second.
When you drift without signaling, the system applies a gentle corrective torque through the Electric Power Steering motor — typically 2–5 Nm — to nudge you back into the lane.
There are three levels: Lane Departure Warning (alert only), Lane Keep Assist (warning + gentle correction), and Lane Centering (continuous active centering).
Combining LKA with ACC gives you Level 2 autonomy — the car handles both speed and steering while you supervise.
On Indian roads, LKA works best on expressways with clear markings. Faded or missing lane lines, heavy rain, and chaotic traffic remain challenges.
Final Thoughts
Writing this post — and the ACC one before it — has given me a deeper appreciation for how much engineering goes into features we take for granted. The idea that a small camera behind your windshield can capture 30 images per second, run edge detection algorithms, identify mathematical lines using the Hough Transform, calculate your position within the lane, and send a corrective signal to an electric motor in your steering column — all in under 35 milliseconds — is remarkable.
And when you combine this with Adaptive Cruise Control, your car is simultaneously managing radar waves for speed control and camera vision for lane positioning. Two entirely different sensing technologies, working together, to give you a semi-autonomous driving experience.
If you’re buying a car in 2026, look for one with both ACC and Lane Keep Assist. Not because it’s a fancy spec-sheet feature, but because on that one long night drive when your attention fades for a second, this system might be the difference between a safe trip and a disaster.
Stay in your lane. Or let the car do it for you.
If you haven’t read the ACC post yet, start there — it’s the other half of Level 2 autonomy.
Good day to you 🫡.